
[Paper Review] OSFV(Face vid2vid): One-Shot Free-View Neural Talking-Head Synthesis for Video Conferencing 논문 분석
업데이트:
- Paper:
OSFV(face vid2vid): One-Shot Free-View Neural Talking-Head Synthesis for Video Conferencing (CVPR 2021): arxiv, project, unofficial code
OSFV: neural talking-head video synthesis & compression을 할 수 있는 framework
unsupervised 3D keypoint로 person-specific canonical keypoint를 decompose하고motion-related transformation으로 이 keypoint를 수정- keypoint를 transformation에 따라 다양하게 수정하여 비디오를 생성하므로, user가 자유롭게 view-point를 조절한다거나, 표정을 변화시킬 수 있다.
- 또한, 본 논문은 기존 모델보다 video compression이 잘된다고 보고한다. (bandwidth가 줄어들 뿐만 아니라 비디오 해상도도 좋아짐)
1. Introduction
- neural talking-head video synthesis model
- 본 모델은 이미지로부터 keypoint를 잘 encoding하여 머리를 잘 rotation시킬 뿐만 아니라, neural talking head task에서도 좋은 성능을 보였다.
- source image는 target person의 외형(appearance)를 잘 encoding하며,
- driving video는 output video의 motion을 잘 나타내도록 encoding된다.
- one-shot setting
- 2D-based model
- (장점) 3D graphics-based model에 비해 모델이 가벼우며, 머리, 턱수염 등을 다루기 더 용이하다.
-
(한계) 기존 2D-based one-shot talking head model들은 original view point에서만 talking head video 생성이 가능했다. 즉, 다양한 view point에서 이미지를 합성하기가 어렵다.
→ 본 모델은 고정된 view point 뿐만 아니라 새로운 local free-view에 대해서도 비디오 합성이 가능!

⭐️ Main Contribution
- novel one-shot neural talking-head synthesis approach: 기존 SoTA 모델들보다 더 좋은 성능을 냄
- 3D graphic model 없이 output video의 Local free-view control이 가능해짐 (다양한 view-point의 비디오 생성이 가능해짐)
- video stream에서의 bandwith가 10배 넘게 감소
2. Method
- source image: $s$
- driving video: $(d_{1}, d_{2}, \ldots, d_{N})$
- output video: $(y_{1}, y_{2}, \ldots, y_{N})$
- $s=d_1$ 이라면 reconstruction task이고, $s$가 driving video의 프레임이 아니라면 motion transfer task

모델은 크게 3가지 step으로 작동한다.
- (a) source image feature extraction
- (b) driving video feature extraction
- (c) video generation
2D keypoint를 사용하던 FOMM과 다르게 OSFV은 3D keypoint를 사용한다.
- keypoint는 unsupervise하게 학습되며 (FOMM과 동일)
- facial expression뿐만 아니라 사람의 geometric한 특성을 모델링한다.
2.1 Source image feature extraction
Figure (3)
- Appearance feature extractor $F$
- source image $s$ 를 3D apperance feature volume $f_s$ 로 mapping
- 3차원: w, h, d
- 3D feature volume을 잘 모델링해야지 3D space에서 keypoint가 잘 동작하고, 머리가 잘 translation & rotation 될 수 있음
- Canonical keypoint detector $L$
- source image로 부터 3D keypoint $x_{c, k} \in \mathbb{R}^{3}$를 추출해주는 모듈
- 저자들은 $K=20$ 으로 두고 실험을 했다고 함
- 일반적인 facial landmark와 다르게 unsupervise하게 학습
- 사람의 geometry signature를 encoding하도록 학습됨
- Unsupervised Learning of Object Landmarks through Conditional Image Generation (NeurlPS 2018)
- Head pose estimater network $H$
- source image에서 head pose에 대한 정보를 추정
- parameterized by a rotation matrix $R_{s} \in \mathbb{R}^{3 \times 3}$ and a translation vector $t_{s} \in \mathbb{R}^{3}$
- Hopenet: deep-head-pose (CVPR workshop 2018)
- Expression deformation estimator $\Delta$
- K 3D deformation $\delta_{s,k}$ (neutral expression으로 부터 얻어진 keypoint들의 변화)를 추정
위의 모듈들을 통해서 최종적으로 필요한 source keypoint를 구할 수 있다.
- $L$ 로부터 얻어진 identity-specific information과 $H, \Delta$ 로부터 얻어진 motion-related information을 이용하여 source 3D keypoint $x_{s,k}$ 를 구함 (이 과정에서 transformation도 진행)
Keypoint computation pipeline

- 3D keypoint decomposition
- geometry-signatures, head poses, expressions
- FOMM과 다르게 OSFV는 Jacobian을 추정하지 않는다
- FOMM은 단순히 keypoint의 displacement만을 사용하지 않고 그 주위의 neighbourhood까지 사용할 수 있도록 local affine transformation을 하는데, 이때 Jacobian matrix를 추정하여 비선형 변환인 local affine transformation을 선형으로 근사하곤 했다.
- 대신 OSFV는 head pose estimator 모듈을 통해 head rotation 정보를 얻곤 하는데, 이 정보가 local patch transformation을 하는데 도움을 준다고 보고한다.
- (+) Jacobian 추정을 안하면 비디오 합성시에 transmission bandwidth가 줄어든다고 함
2.2 Driving video feature extraction
OSFV는 supervised 하게 학습이 된다.
- source image가 driving image를 모방하도록 학습
따라서 driving image $d$ 로부터 새롭게 canonical 3D keypoint를 뽑지 않고 source image에서 뽑은 정보 $x_{c,k}$ 를 재사용한다.
- driving image에서의 3D keypoint source image의 kp와 동일한 방식으로 얻어짐
다음과 같이 keypoint는 3D head pose에 따라 자유롭게 transformation 되기 때문에, 우리가 자유롭게 view point를 바꾸고 싶다면 R & t 값을 조절함으로써 비디오를 합성하면 된다.
\[R_{d} arrow R_{u} R_{d} \text { and } t_{d} \longleftarrow t_{u}+t_{d}\]2.3 Video Generation

- source image로부터 K canonical keypoints $x_{c,k}$ 를 구함 (by
Canonical keypoint detector$L$) Head pose estimator$H$ 와Expression deformation estimator$\Delta$ 의 output 값을 이용하여 source와 driving image의 keypoint를 구함 ⇒ $x_{s,k}, x_{d,k}$- 1st order approximation 방식을 이용하여 k개의 keypoint들이 얼마나 warping 되었는지 (warping flow $w_k$ ) 를 계산한다
- source와 driving keypoint $x_{s,k}, x_{d,k}$ 로 부터 K warping flow $w_k$ 를 추정
- 3에서 얻은 warping flow $w_k$ 정보를 사용하여 source feature volume $f_s$ 를 warping ⇒ $w_K(f_s)$
Motion field estimator$M$ 를 이용하여 $w_K(f_s)$ 로부터 flow composition mask $m$을 추정- 이 mask는 $K$개의 flows에서 어떤 3D spatial location을 사용할지를 결정
- 5에서 계산한 Flow composition mask $m$ 을 이용하여 final flow인 composited flow field $w$ 를 구함
- Source feature volume $f_s$ 를 final flow인 $w$ 에 따라 warping한 후 ⇒ $w(f_s)$
- 이 값을
Generator에 넣어 Output image $y$ 를 생성 !
2.3.1 Network Architectures

- Motion field estimator $M$
- kp를 예측한 후에는 예측된 $x_{s,k}, x_{d,k}$를 first-order approximation하여 warping flow map $w_k$ 을 추정한다.
- $p_d$ 를 driving image $d$ 의 3D feature volume, $p_s$ 를 source image $s$ 의 3D feature volume 라고 하면
- source feature $f_s$ 를 warping: $w_k(f_s)$
- 3D U-Net 구조인 Motion field estimator에 $w_K(f_s)$ 를 input으로 넣어 flow composition mask $m$을 추정
- K 3D masks: ${m_{1}, m_{2}, \ldots, m_{K}}$
-
the final warping map $w$ 를 구성
\[\sum_{k=1}^{K} m_{k}(p_{d}) w_{k}(p_{d})\] - 2D occlusion mask도 같이 구해놨다가 나중에 Generator의 input으로 사용
- kp를 예측한 후에는 예측된 $x_{s,k}, x_{d,k}$를 first-order approximation하여 warping flow map $w_k$ 을 추정한다.
- Generator: warped 3D apearance features $w(f_s)$ 를 projection해서 2D image로 변환
2.4 Training
- train the network: $F, \Delta, H, L, M, G$
2.4.1 Loss function
\[\begin{aligned} \mathcal{L}=& \lambda_{P} \mathcal{L}_{P}(d, y)+\lambda_{G} \mathcal{L}_{G}(d, y)+\lambda_{E} \mathcal{L}_{E}(\{x_{d, k}\})+\\ & \lambda_{L} \mathcal{L}_{L}(\{x_{d, k}\})+\lambda_{H} \mathcal{L}_{H}(R_{d}, \bar{R}_{d})+\lambda_{\Delta} \mathcal{L}_{\Delta}(\{\delta_{d, k}\}) \end{aligned}\]- where λ’s are the weights and are set to 10, 1, 20, 10, 20, 5 respectively in our implementation.
- output image가 ground truth와 비슷하도록 만들어주는 loss
- Perceptual Loss $\mathcal{L}_{P}$
- driving image와 output image간의 p-loss
- FOMM과 동일하게 multi-scale implementation을 사용
- Additionally we propose to use this loss on a number of resolutions, forming a pyramid obtained by down-sampling Dˆ and D, similarly to MS-SSIM [39, 32]. The resolutions are 256 × 256, 128 × 128, 64 × 64 and 32 × 32. There are 20 loss terms in total. (FOMM 논문 3.3)
- VGG pre-trained network로 output image와 ground truth의 feature map을 추출한 후, feature 간의 L1 distance를 계산 → 각 이미지들을 (output, GT) downsampling한 다음에 다시 feature map으로 L1 dis 계산
- 이렇게 multiple image resolution에 대해 loss 계산을 3번 반복
- pretrained face VGG network로 single-scale perceptual loss를 계산한 후 final p-loss에 더해줌
- GAN Loss $\mathcal{L}_{G}$
- multi-resolution patch GAN을 사용
- discriminator가 patch level에서 predict
- patch GAN의 hinge loss
- 추가적으로 discriminator feature matching loss를 도입했다고 함
- 2 scale의 discriminator
- single-scale discriminator:
256x256 - two-scale discriminator:
512x512
- single-scale discriminator:
- multi-resolution patch GAN을 사용
- Perceptual Loss $\mathcal{L}_{P}$
- keypoint들이 consistent 하고 정확하게 뽑히도록 학습하는 loss
- Equivariance loss $\mathcal{L}_E$
- image specific keypoints $x_{d,k}$ 가 consistent 하도록 보장하는 loss
- image $d$ 가 2D transformation을 된다면 $T(d)$ , predicted keypoint $x_d$ 역시 동일하게 transform이 되어야 한다. $x_{T(d)}$이
- 이러한 성질을 이용하여 본 논문에서는 $L_1$ loss를 걸어줌
- 본 논문에서는 2D keypoint가 아니라 3D kp를 사용하기 때문에 loss를 계산하기 전에 이미지 plane에 keypoint를 orthographic projection을 했다고 함
- 단순히 $z$ values를 drop
- Keypoint prior loss $\mathcal{L}_L$
- image-specific kp $x_{d,k}$ 가 국소적인 부분에 모여있지 않도록 keypoint를 펼쳐주는 loss
- 각 keypoint사이의 거리가 멀어지도록 하는 부분
- keypoint pair의 거리가 일정 threshold $D_t$ 보다 커지면 패널티
- 평균 depth가 target value $z_t$ 와 비슷하도록 loss
- 저자들은 $D_t=0.1, z_t=0.33$ 으로 두고 실험했다고 함
- Equivariance loss $\mathcal{L}_E$
- Head pose와 keypoint가 잘 학습되도록 돕는 loss
- Head pose loss $\mathcal{L}_H$
- head rotation $R_d$ 이 ground truth $\bar{R}_d$ 와 비슷하도록 강제하는 loss
- 이때 $\bar{R}_d$는 pre-trained deep head pose로 inference된 값
- head rotation $R_d$ 이 ground truth $\bar{R}_d$ 와 비슷하도록 강제하는 loss
- Deformation prior loss $\mathcal{L}_D$
- expression deformation $\delta_{d,k}$ 는 canonical keypoint의 편차(deviation)이기 때문에 너무 크면 안된다.
- 이 값이 작도록 강제하는 loss (L1 norm)
- Head pose loss $\mathcal{L}_H$
3. Experiments
3.1 Datasets
- VoxCeleb2
- 1M talking-head video
- train: 280K videos
- validation: 36K
- TalkingHead-1KH
- 저자들이 직접 모은 large-scale talking head video datasets (1000hours)
- 추가로 Ryerson audio-visual dataset의 비디오도 사용했다고 함
- 180K videos
- Vox2보다 화질도 좋고 용량도 크다고 함 (저자들이 해상도와 bit-rate가 높은 영상들만 추려서 사용했다고 함)
3.2 Talking-head image synthesis
3.2.1 Baseline
FOMM: First Order Motion Model for Image Animation (NeurIPS 2019) : arxiv, code, reviewfs vid2vid: Few-shot Video-to-Video Synthesis (NeurlPS 2019): arxiv, project, codeBi-layer model: Fast Bi-layer Neural Synthesis of One-Shot Realistic Head Avatars (ECCV 2020): arxiv, project, code, review- bi-layer model은 배경 예측을 못해서 배경을 빼고 quantitative analyses
bi-layer는 pre-trained model을 이용하고FOMM이랑fs vid2vid은 scratch부터 학습했다고 함
3.2.2 Metrics
- reconstruction faithfulness: L1, PSNR, SSIM/MS-SSIM
- L1: GT랑 recon image간의 average L1 dist
- PSNR: GT랑 recon image간의 MSE를 계산 → image recon quality 측정
- SSIM/MS-SSIM: structural similarity between pataches of the input images를 계산 → PSNR보다 좀더 global illumination changes에 robust 함
- output visual quality: FID
- OSFV 모델을 통해 생성한 비디오가 얼마나 original video처럼 진짜같을지
- FID: pre-trained Inception V3 network를 사용해서 GT와 recon image의 feature를 뽑고 distance를 계산
- semantic consistency: AKD(average keypoint distance)
- original video에서 뽑힌 landmark랑 생성된 비디오의 landmark가 얼마나 유사한지
- facial landmark detector를 사용해서 landmark간의 average distance를 구함
3.2.3 Same-identity reconstruction
- source image와 driving image를 같은 사람으로 두고 s가 d를 recon하도록 실험

- 성능 짱 좋음
- OSFV 모델은 학습해야하는 parameter가 많은 무거운 모델인데, 저자들은 단순히 모델이 커서 성능이 잘 나온게 아니라는 걸 증명하려고 FOMM-L와도 비교실험했다고 함
- FOMM-L: FOMM보다 filter size가 2배나 큰 모델

3.2.4 Cross-identity motion transfer
- source와 drive image간의 identity가 다른 경우에도 source image가 drive image의 정보를 잘 모사하도록 비디오가 생성이 되는지
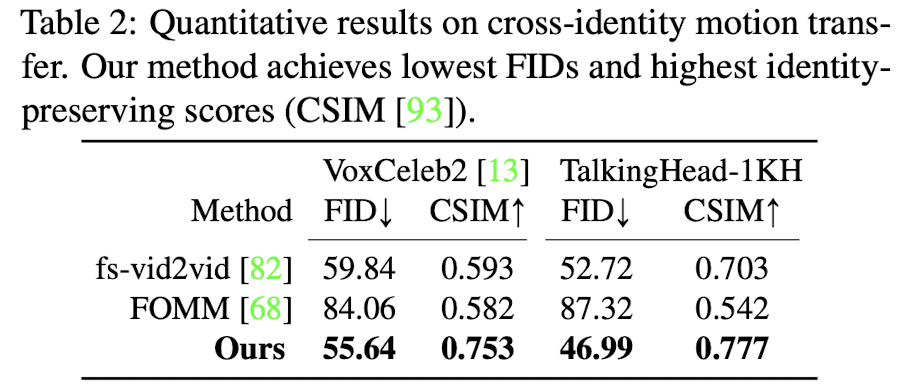

- 잘됨
3.2.5 Relative motion transfer
- (Two-step vs direct) keypoint prediction
- 현재 OSFV 모델은 keypoint 예측을 two-step으로 함
- canonical keypoint 예측 → $x_{c,k}$
- transformation & deformation 적용 → source kp, drive kp $x_{s,k}, x_{d,k}$
- 한번에 바로 keypoint를 뽑을 수는 없을까?
- 저자들은 이미지로부터 바로 source kp, drive kp를 예측하는 network를 학습 시켜봤다고 한다.
- 표준 kp인 $x_{c,k}$ 를 예측하지 않고, 바로 source kp, drive kp $x_{s,k}, x_{d,k}$ 를 예측
- 즉, Pose estimator $H$ 와 deformation estimator $\Delta$ 가 필요 없음
- 기존 two-step 방식은 transformation & deformation 정보를 얻기 위해 Pose estimator $H$ 와 deformation estimator $\Delta$ 가 필요했었음
- (결과) 정량적으로도 성능이 안좋으며, head pose에 대한 정보를 encoding하지 않기 때문에 pose control이 안된다.
- 저자들은 이미지로부터 바로 source kp, drive kp를 예측하는 network를 학습 시켜봤다고 한다.
- 현재 OSFV 모델은 keypoint 예측을 two-step으로 함
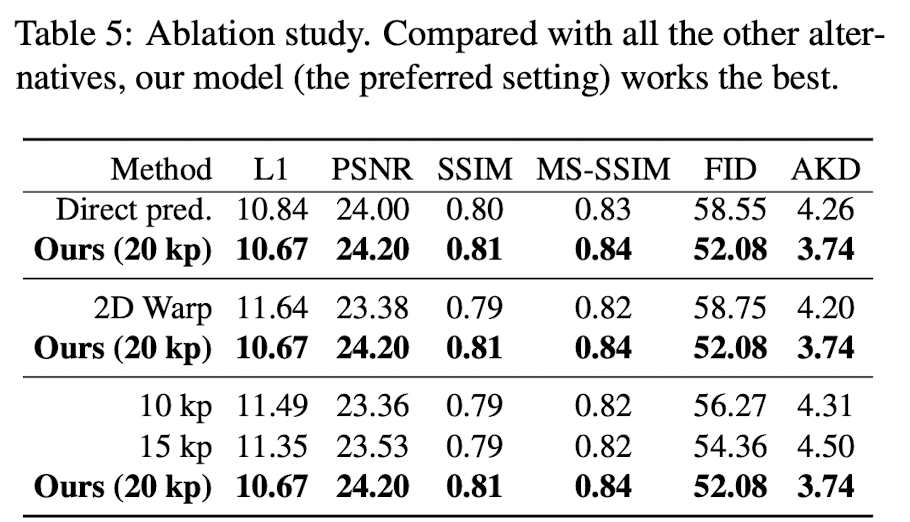
- (3D vs 2D) warping
- 저자들은 예측된 keypoint를 바탕으로 3D feature를 warping해서 3D flow field를 생성하곤 했는데, 이를 2D field에서도 실험해봤다고 한다.
- table 5 참고
- Number of keypoints
- kp도 다양하게 실험해봤는데, 20개가 best
- table 5 참고
3.2.6 Failure cases

Fig 14처럼 손이나 어떤 object가 얼굴을 가리고 있는 경우 synthesis quality가 현저히 떨어짐- 추가로 실패 케이스들이 존재
3.2.7 Canonical keypoints for face recognition
- Canonical keypoint는 pose와 expression 변화와는 무관하게 얼굴의 shape(눈,코,입)과 같은 사람의 geometry signature을 encoding하도록 훈련된다.
- 저자들은 이 canonical keypoint가 얼마나 face recognition을 잘하는지 확인해보았다고 한다.
- random으로 kp를 뽑을 때 보다 27배 더 좋은 성능을, landmark detector보다 5배 더 좋은 성능을 보였다고 한다.
3.3 Face redirection
저자들은 얼굴의 방향을 바꿀 수 있는지도 실험을 했다고 함
- Baselines
- pSp (pixel2style2pixel): original image를 latent space로 projection한 다음에 pre-trained StyleGAN으로 정면의 이미지를 생성
- RaR (Rotate-and-Render): 3D face model을 이용하여 input image를 다른 pose로 re-rendering
- Metrics: 2가지에 대해 평가
- identity preservation
- pre-trained face recognition network 사용
- rotated face와 original face 사이의 거리를 계산
- head pose angles
- pre-trained head pose estimator를 통해 회전된 face의 head angle을 구하고, 원하는 angle이면 good으로 평가 → good의 ratio 계산
- identity preservation


댓글남기기