
[Paper Review] BicycleGAN : Toward Multimodal Image-to-Image Translation 논문 분석
업데이트:
✍🏻 이번 포스팅에서는 Multimodal Image-to-Image translation task에 대해 현실적이고 다양한 이미지를 생성하는, BicycleGAN model에 대해 살펴본다.
-
Paper : [BicycleGAN] Toward Multimodal Image-to-Image Translation (NeurIPS 2018 / Jun-Yan Zhu, Richard Zhang, Deepak Pathak, Trevor Darrell, Alexei A. Efros, Oliver Wang, Eli Shechtman)
기존의 image-to-image translation 연구들은 여러개의 latent code에서 하나의 output으로 many-to-one mapping 되는 mode collapse 문제 가 있었다.
본 논문에서는 이를 해결하기 위해 output에서 latent code로 가는 mapping 네트워크를 학습시켰다.(bijective consistency) 또한, 다양한 objection function과 network architecture, latent code들을 제시하여 현실적이고 다양한 이미지를 생성하였다.
⭐ BicycleGAN
- image-to-image translation의 mode collapse 문제 해결
- 다양한 style의 이미지를 생성할 수 있게 됨(multimodal)
1. Introduction
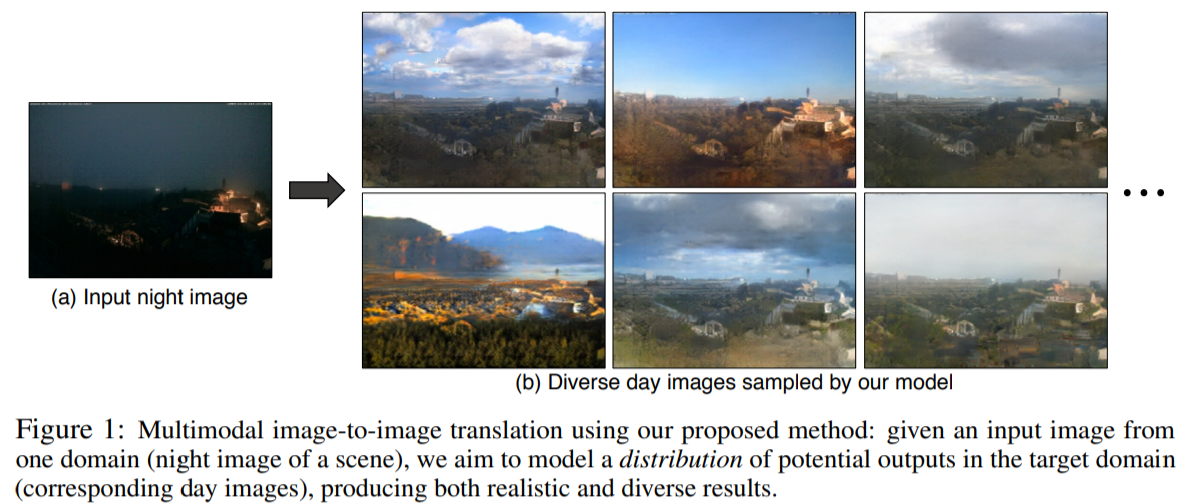
그동안의 생성모델은 하나의 이미지를 생성했다면, 본 논문은 하나의 input으로 부터 여러 개의 이미지를 생성하는 Multimodal Image-to-Image Translation에 관한 연구이다. BicycleGAN은 (1) 현실적이고 (2) 다양한 이미지 생성을 목표로 한다.
Multimodality한 이미지를 만드려면 low-dimensional latent code의 확률분포와 input 이미지로 output 이미지를 생성할 수 있어야한다. 또한, mode-collapse가 생기지 않도록 아주 작은 수의 input을 output과 mapping 해야한다.
Pix2Pix
본 논문은 paired dataset에 대해 고해상도의 이미지를 생성한 pix2pix framework를 기반으로 하였다.
pix2pix의 loss function은 latent code와 실제 input image를 모두 입력으로 받아 학습을 한다.
이때, 문제는 Generator가 학습 시에 latent code를 사용하지 않는다는 것이다. (latent code를 넣었을 때나 뺐을 때 모두 비슷하게 학습이 됨)
따라서 본 논문은 training과정에서 latent code를 활용하도록 latent space와 output이 bijetion한 관계를 갖게 하였다.
CycleGAN
또한, BicycleGAN은 CycleGAN처럼 (1) latent code를 output으로 mapping하고 (2) output 이미지를 latent space로 다시 복구하는 encoder를 학습하여 여러개의 latent code가 하나의 image를 생성하지 않도록 한다.(mode collapse 예방)
Objective Functions
- cVAE-GAN
- ground truth image를 latent space로 encoding
- cLR-GAN
- latent vector -> G 로 학습 : 이렇게 되면 생성된 이미지는 현실적이지만, ground truth랑 비슷하지는 않음
- encoder는 output image에서 latent vector로 복원이 되도록 학습
- latent regressor, infoGAN
- BicycleGAN
- latent encoding과 output의 bijective consistency를 학습!
2. Related Work
Generative modeling
다양한 생성 모델이 있지만 GAN이 효과적이다.
Conditional Image Generation
- conditional VAEs
- autoregressive models
- image-to-image conditional GANs
- (좋은 성능) 고해상도의 이미지를 생성할 수 있다
- 다만, Generator가 random noise를 무시하고 conditional information만을 이용하여 이미지를 생성하기 때문에 다양성이 떨어진다. (noise를 무시하면 학습이 더 안정적으로 됨)
Explicitly-encoded multimodality
latent와 image space가 tight하게 연결되도록 이 둘을 encoding한 후, generator에 넣어 학습을 시킨다.
3. Multimodal Image-to-Image Translation
⭐Goal : 본 논문은 간단한 신발의 edge로부터 여러 형태의 신발을 만들어내는 것처럼 두 image domain간의 multi-modal mapping을 학습하는 것이 목표이다.
- input domain : $\mathcal{A} \subset \mathbb{R}^{H \times W \times 3}$
- output domain : $\mathcal{B} \subset \mathbb{R}^{H \times W \times 3}$
input instance $A$에 대해 다양한 paired instance $B$를 만들어야하지만, training을 할 때에는 (input, output)의 하나의 data pair를 이용하여 훈련을 한다.
따라서 본 모델은 test time 때 $p(\mathbf{B} \mid \mathbf{A})$로 부터 다양한 output $\mathcal{\hat{B}}$ 을 sampling하도록 학습을 한다.
\[G:(\mathbf{A}, \mathbf{z}) \rightarrow \mathbf{B}\]3.1 BaseLine : Pix2pix + noise ($\mathbf{z} \rightarrow \widehat{\mathbf{B}}$)

baseline으로는 pix2pix의 모델을 사용한다. 다만, pix2pix의 식을 그대로 사용한다면 학습시에 noise를 무시하는 문제가 생기므로 noise를 고려하도록 모델을 수정한다. (3.2, 3.3)
\[\mathcal{L}_{\mathrm{GAN}}(G, D)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B})}[\log (D(\mathbf{A}, \mathbf{B}))]+\mathbb{E}_{\mathbf{A} \sim p(\mathbf{A}), \mathbf{z} \sim p(\mathbf{z})}[\log (1-D(\mathbf{A}, G(\mathbf{A}, \mathbf{z})))]\] \[(G)=\mathbb{E}_{\mathbf{A . B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim p(\mathbf{z})}\|\mathbf{B}-G(\mathbf{A}, \mathbf{z})\|_{1}\] \[G^{*}=\arg \min _{G} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}(G, D)+\lambda \mathcal{L}_{1}^{\mathrm{image}}(G)\]3.2 Conditional Variational Autoencoder GAN : cVAE-GAN ($\mathbf{B} \rightarrow \mathbf{z} \rightarrow \widehat{\mathbf{B}}$)

latent vector를 일반 Gaussian 분포에서 뽑으면, noise가 학습 시에 무시될 가능성이 높다. 따라서 latent vector와 ground truth가 연관이 될 수 있도록 latent vector를 B와 관련된 gaussian 확률분포에서 sampling 하도록 모델을 수정한다.
-
$Q(\mathbf{z} \mid \mathbf{B})$가 B의 확률 분포에서 latent vector를 sampling하는 것처럼 되도록 Encoder를 사용한다.
\[\mathbf{z} \sim E(\mathbf{B}), Q(\mathbf{z} \mid \mathbf{B}) \triangleq E(\mathbf{B})\] -
또한, $E(\mathbf{B})$에 의해 encoding된 latent distribution이 random Gaussian 분포와 비슷하도록 아래의 loss를 학습시킨다.
\[\mathcal{L}_{\mathrm{KL}}(E)=\mathbb{E}_{\mathbf{B} \sim p(\mathbf{B})}\left[\mathcal{D}_{\mathrm{KL}}(E(\mathbf{B}) \| \mathcal{N}(0, I))\right]\]
수정된 Objection Function
\[\mathcal{L}_{\mathrm{GAN}}^{\mathrm{VAE}}=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B})}[\log (D(\mathbf{A}, \mathbf{B}))]+\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim E(\mathbf{B})}[\log (1-D(\mathbf{A}, G(\mathbf{A}, \mathbf{z})))]\] \[\mathcal{L}_{1}^{\mathrm{VAE}}(G)=\mathbb{E}_{\mathbf{A}, \mathbf{B} \sim p(\mathbf{A}, \mathbf{B}), \mathbf{z} \sim E(\mathbf{B})}\|\mathbf{B}-G(\mathbf{A}, \mathbf{z})\|_{1}\] \[G^{*}, E^{*}=\arg \min _{G, E} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}^{\mathrm{VAE}}(G, D, E)+\lambda \mathcal{L}_{1}^{\mathrm{VAE}}(G, E)+\lambda_{\mathrm{KL}} \mathcal{L}_{\mathrm{KL}}(E)\]3.3 Conditional Latent Regressor GAN: cLR-GAN $(\mathbf{z} \rightarrow \widehat{\mathbf{B}} \rightarrow \widehat{\mathbf{z}})$

latent vector를 잘 사용하기 위한 방법으로는 latent regressor model과 유사한 objection function을 사용하는 방식이 있다.
이때는 latent code z를 random으로 sampling한 후, Encoder를 활용하여 생성된 이미지를 다시 $\hat{z}$로 복원시키도록 학습을 한다. $\widehat{\mathbf{z}}=E(G(\mathbf{A}, \mathbf{z}))$
최종 object function이다. 이 경우에는 L1 loss를 사용하지 않아도 된다.
\[G^{*}, E^{*}=\arg \min _{G, E} \max _{D} \quad \mathcal{L}_{\mathrm{GAN}}(G, D)+\lambda_{\text {latent }} \mathcal{L}_{1}^{\text {latent }}(G, E)\]3.4 BicycleGAN : Hybrid Model!
bicycleGAN은 3.2와 3.3의 cVAE-GAN과 cLR-GAN의 objective function을 모두 사용한다.
cVAE-GAN을 사용하므로 생성된 이미지는 ground truth의 input-output pair와 유사하며, cLR-GAN을 사용하므로 생성된 이미지는 현실적이다. 두 cycle의 이점을 합친게 bicycle GAN!! $(\mathbf{B} \rightarrow \mathbf{z} \rightarrow \mathbf{B} \operatorname{and} \mathbf{z} \rightarrow \mathbf{B} \rightarrow \widehat{\mathbf{z}})$

4. Implementation
- Generator : U-Net, skip connection 사용
- Discriminator : 2개의 patchGAN
- variant으로는 LSGAN을 참고
자세한 내용은 생략
5. Experiment


pix2pix+noise는 현실적이지만 변화가 거의 없고, cVAE-GAN은 다양성이 있는 이미지를 만들지만, space가 조밀하지 않아서 artifact가 생길 수 있다. cLR-GAN은 다양하지는 않지만 현실적인 이미지를 생성한다.(mode collapse가 생길 수 있음)
bicycleGAN은 다양하고 현실적인 이미지를 만든다.

6. Conclusion
latent vector와 output space를 bijective mapping하는 objective function을 사용함으로써 다양하고 현실적인 이미지를 생성할 수 있게 되었다.
댓글남기기